
Bus Shuttle Otonom di Universitas Waterloo: Persepsi Lingkungan dan Lalu Lintas Berbasis AI
Seeed Studio AIoT Marketing and Partnership Diterjemahkan oleh : Digiware
7/1/20253 min baca
Hardware: reComputer J4012 dengan modul NVIDIA Jetson Orin NX
Penyedia Studi Kasus: Universitas Waterloo
Aplikasi: Persepsi Lingkungan & Perencanaan Jalur
Industri: Kendaraan Otonom & Transportasi
Lokasi Implementasi: Kanada
Untuk menjawab tantangan lingkungan jalan yang kompleks sekaligus menciptakan lingkungan kampus yang lebih aman bagi pejalan kaki, pesepeda, dan kendaraan yang terus lalu lalang, Universitas Waterloo memulai proyek penelitian dengan mengoperasikan bus shuttle otonom bernama WATonoBus. Bus ini dilengkapi dengan Jetson Orin NX pada kendaraan serta node sensor infrastruktur di bundaran luar ring road kampus. Tujuannya adalah mengumpulkan data persepsi lingkungan guna mendukung sistem mengemudi otonom dan memprediksi lintasan objek di area ramai yang tidak dikendalikan secara langsung.


Salah satu tantangan utama adalah memastikan interaksi yang aman antara kendaraan otonom di lingkungan yang dinamis, di mana pejalan kaki, pesepeda, dan kendaraan konvensional saling berbagi ruang. Interaksi ini sangat bergantung pada pengumpulan data yang akurat dan efektif dari berbagai sensor seperti kamera, lidar, dan radar.
Tantangan bukan hanya pada pengumpulan data, tetapi juga pada ketepatan data untuk memungkinkan pemetaan lokal yang presisi dan memperkirakan niat pergerakan pejalan kaki maupun kendaraan. Tahapan berikutnya seperti perencanaan jalur dan pengambilan keputusan sangat bergantung pada prediksi rintangan potensial dan kondisi dinamis objek yang bergerak.
Menghadapi kompleksitas ini membutuhkan integrasi teknologi sensor canggih, metode pemrosesan data yang kuat, serta algoritma pintar untuk memastikan kendaraan otonom mampu mengambil keputusan yang aman dan tepat di lingkungan kampus.
Tantangan
Solusi
Diterapkan pada kendaraan dan sensor infrastruktur di bundaran
Bus otonom ini dilengkapi dengan paket sensor canggih, antara lain:
3 kamera menghadap ke depan dengan lidar 32-line juga menghadap depan
2 kamera samping dan 1 kamera belakang
Lidar kubah 32-line di sudut kendaraan untuk cakupan lokal penuh melalui port Ethernet
2 radar yang ditempatkan di depan dan belakang
GPS presisi tinggi, IMU, dan encoder roda untuk penentuan posisi kendaraan secara akurat
Perangkat edge NVIDIA Jetson Orin NX memproses data dari semua sensor tersebut. Perangkat ini mampu menangani dua kamera setara Basler dart board hingga 160 fps pada resolusi 1080p melalui port USB 3, meskipun pada skenario kampus hanya dibutuhkan 20 fps.
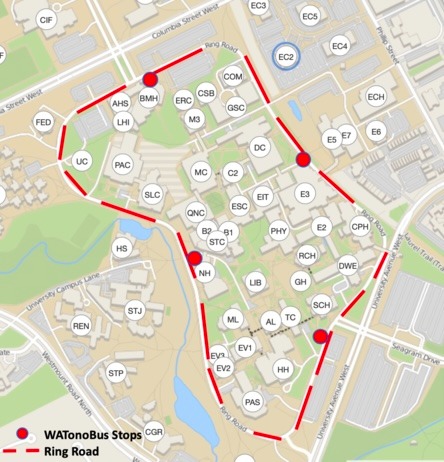

Data lingkungan juga dikumpulkan dari tiang sensor bertenaga surya, memungkinkan penciptaan ruang navigasi yang aman. Sensor ini melacak objek di jalan, mengenali area yang aman untuk dilalui, dan membagikan informasi ini ke kendaraan otonom sesuai permintaan. Bus kemudian memproses data tersebut secara lokal untuk mengambil keputusan cerdas, memastikan navigasi yang aman dalam situasi kompleks seperti bundaran dengan bagian tengah yang ditinggikan atau area parkir yang padat.


Modul pengambilan keputusan dalam WATonoBus memiliki peran penting dalam memastikan keputusan tingkat tinggi yang tepat untuk pergerakan kendaraan dalam berbagai skenario berkendara. Modul ini menangkap data dari berbagai sensor yang bertugas memetakan posisi kendaraan dan menilai kondisi sekitar, termasuk parameter seperti posisi, kecepatan, klasifikasi objek, dan tingkat keyakinan deteksi.
Modul ini secara khusus dirancang untuk mengantisipasi perilaku pejalan kaki, pesepeda, dan kendaraan dalam periode waktu ke depan, menggunakan perencanaan cerdas guna mendukung pengambilan keputusan yang aman. Hal ini sangat penting untuk area persimpangan tanpa lampu lalu lintas atau yang hanya diatur rambu berhenti. Dengan mengekstraksi perkiraan niat dari objek-objek sekitar, sistem mampu melakukan navigasi dengan pandangan ke depan dan presisi tinggi.
Pengambilan Keputusan
Perencanaan Jalur
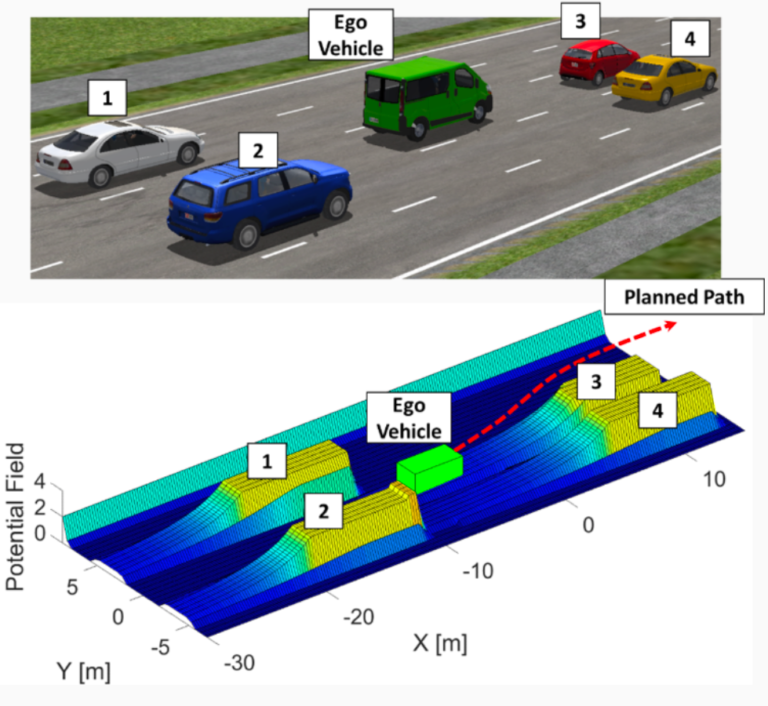
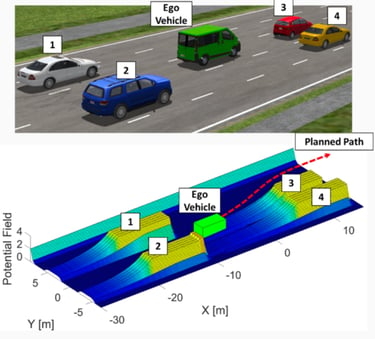
Tujuan utama dari sistem perencanaan jalur dan gerak ini adalah merancang lintasan kendaraan agar sesuai dengan perilaku mengemudi yang diharapkan. Skenario umum tersebut meliputi: menjaga jarak aman, berhenti di titik tertentu, bergabung dengan lalu lintas dengan mulus, serta berpindah jalur.
Sistem harus mampu membawa kendaraan untuk bergerak secara aman, menghindari rintangan, dan merespons situasi darurat dengan efektif di setiap kondisi. Pada akhirnya, modul kontrol kendaraan akan mengeluarkan perintah yang tepat untuk sudut kemudi depan dan torsi pengereman/penggerak, mengikuti jalur yang direncanakan dengan stabil demi pengalaman berkendara yang aman.
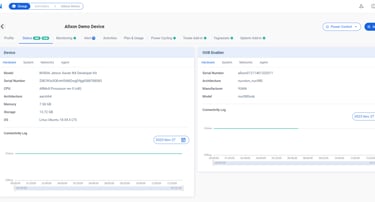
Manajemen Perangkat Edge oleh Allxon
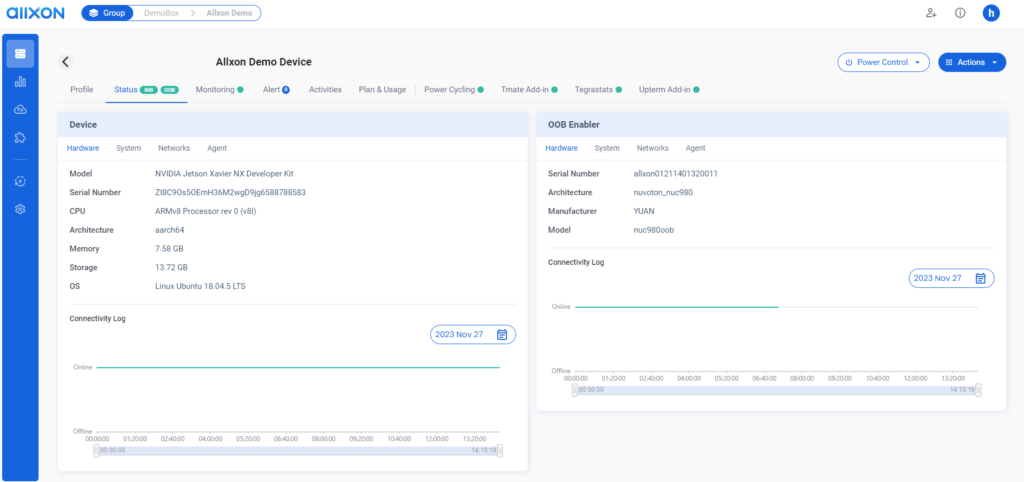
Melalui Solusi Manajemen Armada Allxon, Universitas Waterloo dapat memantau dan mengelola perangkat NVIDIA Jetson Orin NX secara real-time dari jarak jauh. Jika terjadi gangguan pada perangkat, teknologi Out-Of-Band Allxon memungkinkan sistem di-reboot dari jarak jauh untuk mengatasi masalah awal yang berpotensi membahayakan keselamatan.
Selain itu, Allxon juga menyediakan fitur Over-The-Air (OTA), yang memungkinkan pembaruan perangkat lunak, container, atau konfigurasi sistem secara massal dan jarak jauh. Ini memungkinkan Universitas Waterloo untuk segera memperbarui semua perangkat yang digunakan di seluruh kampus setelah setiap pengembangan, memastikan seluruh sistem berjalan lancar dengan versi terbaru.
DigiWare
Robotic & Electronic Components Online Store in Indonesia
Komplek Ruko RMI Blok i No. 22
031-5039460
© 2024. All rights reserved.
customerservice@digiwarestore.com
Surabaya, Jawa Timur, 60284
Our Social Media
Marketplace
Tokopedia ( Surabaya )
Tokopedia ( Bekasi )