

Morphobots untuk Mars: Caltech Mengembangkan Robot Segala Medan sebagai Kandidat untuk Misi NASA.
Universitas ini meluncurkan M4 Morphobot bertenaga NVIDIA Jetson untuk pencarian dan penyelamatan, pengiriman, dan kemungkinan yang luar biasa
by Scott Martin (NVIDIA) Siterjemahkan Oleh Digiware
9/23/20252 min baca
Dua akademisi, Mory Gharib dan Alireza Ramezani, pada tahun 2020 mencetuskan ide robot yang dapat berubah bentuk. Robot ini kini berkesempatan untuk menjalankan misi di luar angkasa: misi Mars Rover NASA. Caltech telah meluncurkan robot serbaguna yang mampu terbang, mengemudi, berjalan, dan melakukan delapan kombinasi gerakan melalui berbagai keterampilannya. Mereka menamainya Multi-Modal Mobility Morphobot, atau M4, yang ditenagai oleh platform NVIDIA Jetson untuk AI dan robotika di tingkat tepi (edge).
"Fungsinya terus bertambah seiring waktu," kata Gharib, seorang profesor aeronautika dan rekayasa terinspirasi biologi di Caltech. "Ketika kami mengusulkannya kepada tim desain kami, awalnya mereka semua menolak." Caltech mendanai penelitian awal robot ini, dan NASA beserta Jet Propulsion Lab (JPL) mendanai fase berikutnya. Mereka juga merekrut Ramezani, asisten profesor teknik elektro dan komputer di Northeastern University, sebagai peneliti fakultas di JPL pada musim panas lalu untuk mengembangkannya lebih lanjut.
Versi M42 robot ini kini sedang dikembangkan di NASA sebagai kandidat Mars Rover dan telah menarik minat dari Departemen Transportasi A.S., menurut Gharib. "Di NASA, kami sedang diuji untuk kemampuan berubah bentuk saat mendarat," katanya. Sejak merilis makalah tentang robot ini di Nature Communications, Gharib mengaku dibanjiri proposal.
"Kami agak pusing melihat bagaimana robot ini tiba-tiba mendapat begitu banyak perhatian," katanya. "Berbagai organisasi ingin melakukan hal-hal berbeda dan datang untuk mendekati kami."
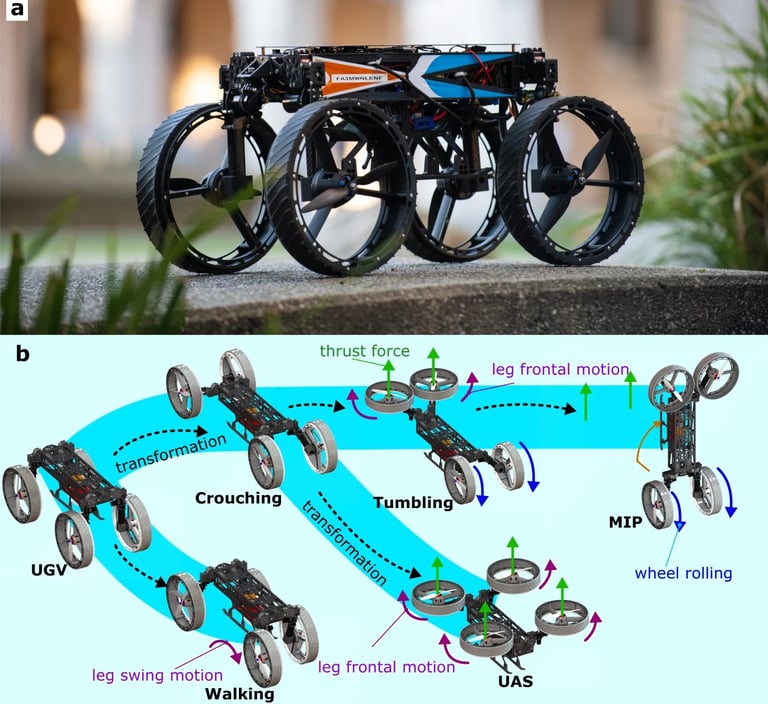
Gambar (a) Menunjukkan M4 dalam mode beroda. Gambar (b) Mengilustrasikan kartun yang menggambarkan transformasi M4 ke mode lain. (Sumber gambar: Nature Communications (Nat Commun))
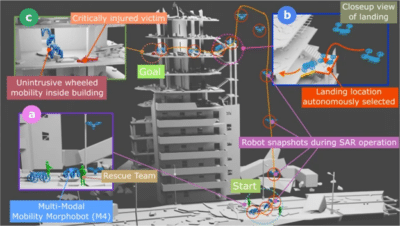
Tim Caltech di balik makalah ini—Gharib, Ramezani, serta Eric Sihite, seorang postdoctoral scholar research associate di bidang kedirgantaraan di Caltech; Arash Kalantari dari JPL; dan Reza Nemovi, seorang insinyur desain di CAST—menyatakan bahwa M4 dirancang untuk berbagai kebutuhan misi, termasuk pencarian dan penyelamatan.
Sebagai contoh, ketika tidak memungkinkan untuk masuk ke suatu area dengan cara bergulir atau berjalan—seperti di zona kebakaran—robot ini dapat terbang dan melakukan pengintaian untuk menilai situasi menggunakan kamera dan sensornya.Menurut Gharib, beberapa pemadam kebakaran di area Los Angeles telah menghubunginya dan menyatakan minat pada M4.
"Bagi petugas pertolongan pertama, ini sangat membantu karena mereka perlu mendarat di area yang aman dan kemudian berkendara menuju lokasi kejadian," katanya.
Pemadaman Kebakaran, Operasi Pencarian dan Penyelamatan
Pengiriman Drone Serbaguna untuk Menyelesaikan Tugas
Tim Caltech juga bertujuan untuk mengatasi masalah pada pengiriman drone dengan menggunakan M4. Menurut Gharib, pengiriman drone adalah "target yang paling mudah" bagi robot ini.
Drone pengiriman konvensional sering menimbulkan masalah karena banyak orang khawatir akan keamanan jika drone mendarat di dekat rumah atau tempat usaha mereka. M4 menawarkan solusi yang lebih aman: ia dapat mendarat di area terpencil yang jauh dari keramaian, lalu berkendara untuk menyelesaikan pengirimannya.Selain itu, M4 juga bisa terbang ke area yang sulit dijangkau oleh truk pengiriman atau area yang tidak bisa dilayani sama sekali.
"Ada banyak tempat yang tidak bisa dijangkau oleh pengiriman truk," katanya.
Saat ini, M4 mampu bergerak dengan kecepatan hingga 64 km/jam dan baterainya bisa bertahan hingga 30 menit dalam sekali pengisian daya. Namun, tim sedang berupaya merancang drone yang lebih besar dengan waktu terbang lebih lama, muatan lebih besar, dan jarak tempuh yang lebih jauh. Potensinya tidak terbatas.

DigiWare
Robotic & Electronic Components Online Store in Indonesia
Komplek Ruko RMI Blok i No. 22
031-5039460
© 2024. All rights reserved.
customerservice@digiwarestore.com
Surabaya, Jawa Timur, 60284
Our Social Media
Marketplace
Tokopedia ( Surabaya )
Tokopedia ( Bekasi )