

Tips Meningkatkan Akurasi Model Deteksi Objek: Optimalkan Penerapan YOLOv8 di NVIDIA Jetson!
Seeed Studio AIoT Marketing and Partnership Diterjemahkan oleh : Digiware
2/20/20253 min baca
Dalam dunia visi komputer dan kecerdasan buatan, para pengembang menghadapi tantangan besar: kesenjangan yang nyata antara akurasi deteksi objek yang ditunjukkan oleh model mutakhir dan hasil yang diperoleh dalam aplikasi praktis. Disparitas ini muncul akibat berbagai tantangan teknis. Pertama, model-model ini sering kali mengandalkan dataset besar dan sumber daya komputasi yang sulit untuk direplikasi dalam lingkungan nyata. Selain itu, masalah seperti adaptasi domain, kompleksitas penyempurnaan model, serta bias yang melekat dalam data pelatihan semakin memperumit upaya mencapai akurasi tinggi.
Dalam perjalanan ini, kita akan mengeksplorasi berbagai metode dan strategi untuk mengatasi tantangan tersebut, memberikan wawasan tentang bagaimana pengembang dapat meningkatkan sistem deteksi objek mereka agar memenuhi standar tinggi yang ditetapkan oleh model-model canggih.
Mengapa akurasi deteksi yang sebenarnya tidak begitu menjanjikan?
Seperti yang telah disebutkan sebelumnya, keterbatasan dalam mencapai akurasi deteksi objek yang menjanjikan dalam skenario nyata dapat disebabkan oleh berbagai kompleksitas yang timbul dari perbedaan antara dataset pelatihan dan pengujian asli, seperti dataset COCO yang banyak digunakan, dengan data atau gambar yang digunakan dalam penerapan di dunia nyata.
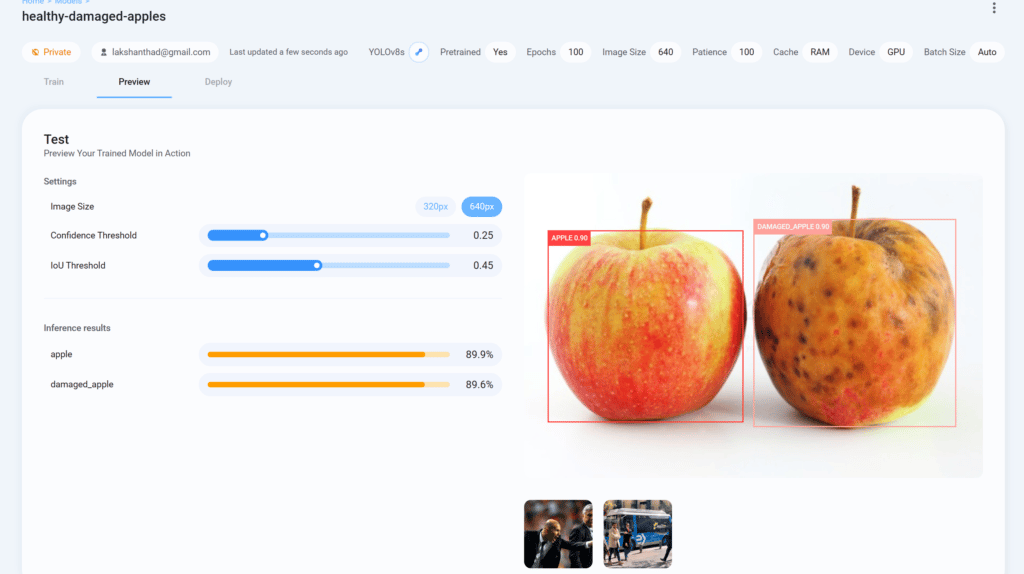
Kategori status berdasarkan satu jenis objek (misalnya: apel segar vs. apel busuk)
Salah satu penyebab utama perbedaan ini adalah variasi yang melekat dalam kategori objek. Meskipun dataset COCO mencakup beragam kategori objek, skenario di dunia nyata sering kali menghadirkan kategori yang belum pernah dilihat atau kurang terwakili, sehingga menyulitkan model untuk melakukan generalisasi dengan akurat.Variasi dalam orientasi dan sudut pandang objek
Objek yang ditemukan dalam skenario penerapan dapat memiliki orientasi dan sudut pandang yang sangat berbeda dari lingkungan terkontrol dalam data pelatihan, yang dapat menyebabkan penurunan kinerja deteksi.Kondisi pencahayaan
Variasi dalam tingkat pencahayaan dan lingkungan menjadi tantangan besar bagi model yang awalnya dilatih dengan gambar yang memiliki pencahayaan optimal dan standar.
Akibatnya, perbedaan-perbedaan ini secara keseluruhan menjadi hambatan teknis dalam mencapai akurasi deteksi yang diinginkan, sehingga dibutuhkan solusi dan teknik inovatif untuk menjembatani kesenjangan antara data pelatihan dan skenario penerapan di dunia nyata.
Metode yang Dapat Dioptimalkan
1. Memperluas Dataset untuk Meningkatkan Generalisasi
Salah satu strategi paling efektif dan hemat biaya untuk meningkatkan akurasi deteksi objek adalah dengan memperluas dataset. Ini mencakup pengumpulan data tambahan yang secara khusus disesuaikan dengan skenario penerapan. Dengan cara ini, tidak hanya volume data pelatihan yang bertambah, tetapi model juga lebih siap menghadapi tantangan unik yang ada di dunia nyata. Menangani data yang hilang dan meningkatkan ketepatan pelabelan merupakan aspek penting dalam proses ini.
2. Ekstraksi Fitur untuk Pemahaman yang Lebih Baik
Dengan mengekstrak lebih banyak informasi dari data yang ada dan menciptakan fitur baru, model dapat lebih baik dalam menafsirkan serta memahami nuansa dalam data pelatihan. Mengatasi masalah seperti skewness variabel dan outlier melalui rekayasa fitur yang cermat dapat mengurangi dampak negatifnya terhadap kinerja model, sehingga menghasilkan deteksi objek yang lebih andal dan akurat.
3. Memanfaatkan Berbagai Algoritma untuk Kinerja yang Lebih Baik
Menggabungkan beberapa algoritma dapat memberikan peningkatan signifikan dalam akurasi deteksi objek. Salah satu contohnya adalah YOLO-ReT, sebuah modul inovatif yang dirancang untuk interaksi fitur multi-skala. Pendekatan baru ini memanfaatkan hubungan kombinatorial antara berbagai skala fitur dalam metode mutakhir yang sebelumnya belum dimanfaatkan.
YOLO-ReT, ketika dipadukan dengan backbone MobileNetV2×0.75, tidak hanya mencapai akurasi luar biasa—68.75 mAP pada Pascal VOC dan 34.91 mAP pada COCO—tetapi juga menawarkan kecepatan yang unggul, melampaui model sekelasnya dengan peningkatan 3.05 mAP dan 0.91 mAP, semuanya sambil berjalan secara real-time pada platform seperti NVIDIA Jetson Nano.
Pendekatan inovatif ini menandai pergeseran paradigma dalam deteksi objek, menghadirkan keseimbangan antara presisi dan efisiensi.
Langkah Selanjutnya – Latihan Melatih Model dengan Dataset Anda Sendiri
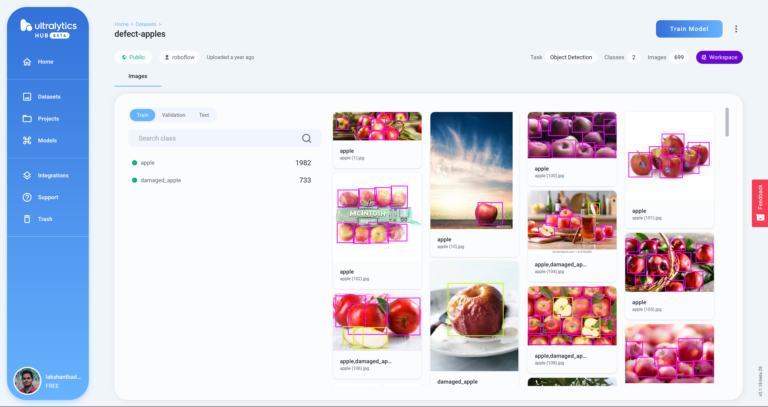
1. Gunakan Roboflow untuk Membawa Model ke Workspace, lalu Salin Private Roboflow API
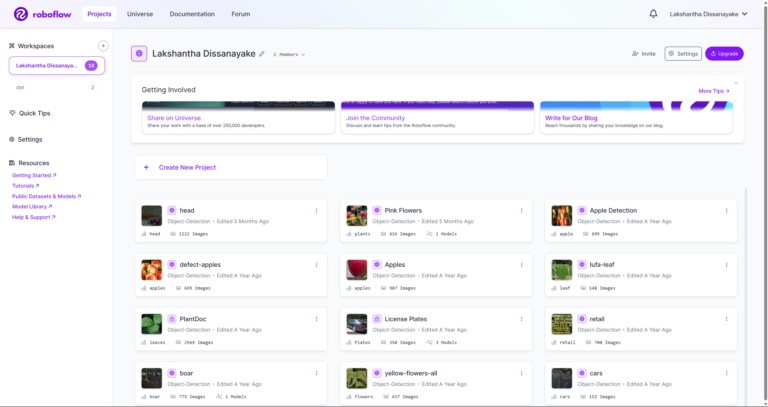
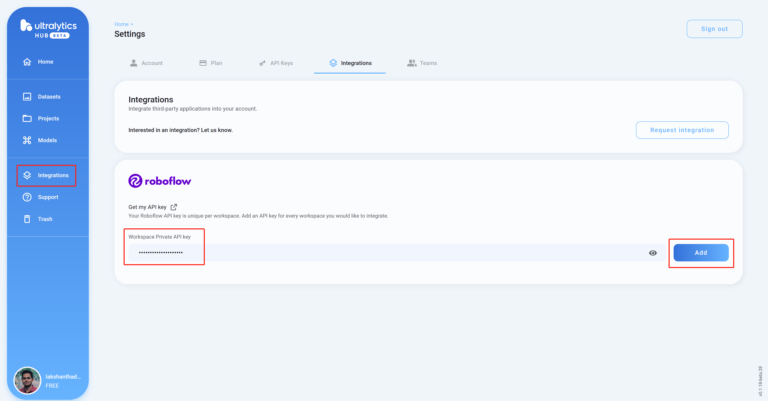
2. Tambahkan Workspace Roboflow ke Ultralytics HUB
3. Latih Model dengan Arsitektur YOLOv8s Menggunakan Dataset yang Dapat Diakses Melalui Workspace Roboflow
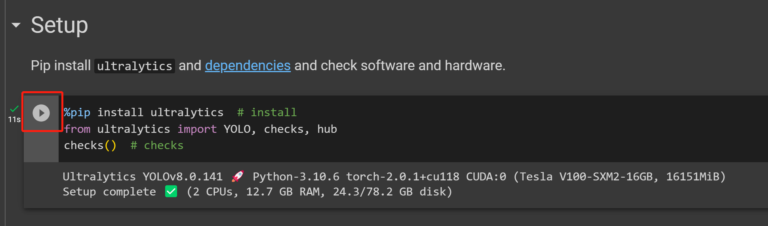
4. Hubungkan Notebook Google Colab dengan Ultralytics HUB untuk memulai proses pelatihan dengan mudah serta memantau progres pelatihan secara real-time.
5. Unggah Gambar Uji ke tab Preview di Ultralytics HUB untuk memeriksa kinerja model, lalu unduh model yang telah dilatih dalam format yang diinginkan untuk melakukan inferensi dengan YOLOv8.
DigiWare
Robotic & Electronic Components Online Store in Indonesia
Komplek Ruko RMI Blok i No. 22
031-5039460
© 2024. All rights reserved.
customerservice@digiwarestore.com
Surabaya, Jawa Timur, 60284
Our Social Media
Marketplace
Tokopedia ( Surabaya )
Tokopedia ( Bekasi )